
Project information
Donkey Car Project
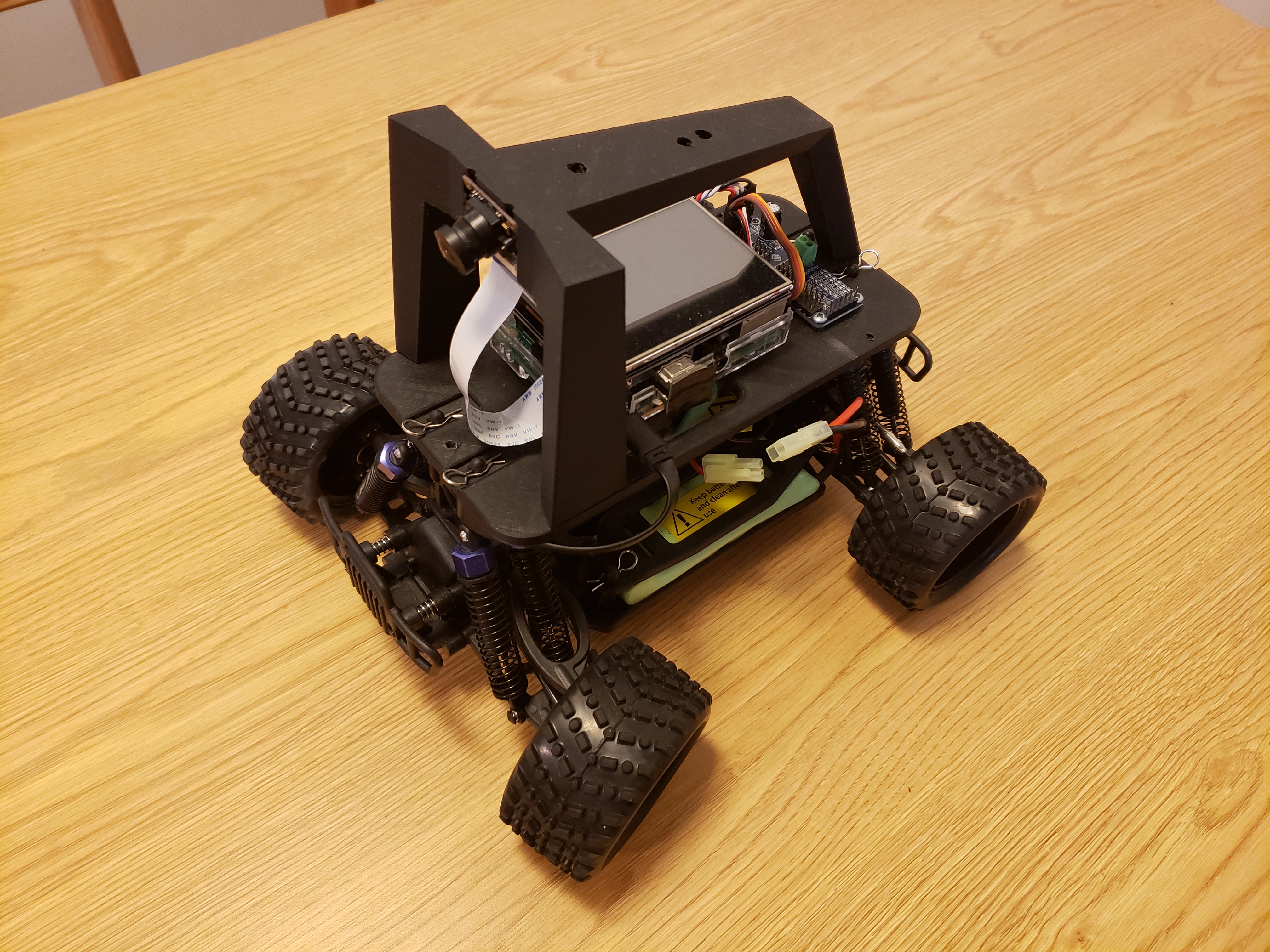
This was my first full-on robotics project. The robot was made of an RC Car, a PCA9685 Servo Driver, a Raspberry Pi and an 8MP PiCam, according to the Donkey Car specifications. The RPi would operate two ROS nodes to recieve control messages and publish images from the camera. Processing and control would be performed on a separate computer over Wifi. The control system performed well in simulation, but the drive train of the RC car is best suited for fast, imprecise motion, not ideal for a low bitrate camera and high latency controls.